|
概述
CyberGrasp系统是一种适用于手指和手的创新力反馈系统。它可以让你“伸进电脑”,抓住电脑生成的或遥控的物体。
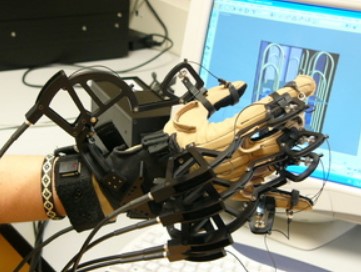
CyberGrill设备是一种轻量级的力反射外骨骼,可安装在CyberGlove数据手套(有线版本)上,并为每个手指添加阻力反馈。通过CyberGrasp力反馈系统,用户能够在模拟虚拟世界中感受计算机生成的3D对象的大小和形状。
抓握力由肌腱网络产生,肌腱通过外骨骼到达指尖。有五个致动器,每个手指一个,可以单独编程,以防止用户的手指穿透或挤压虚拟实体对象。高带宽致动器位于一个小的致动器模块中,可以放在桌面上。此外,由于CyberGrass系统不提供接地力,致动器模块也可以佩戴在GraspPack背包中进行便携式操作,显著增加了有效工作空间。
该装置在整个运动范围内施加大致垂直于指尖的抓握力,并且可以单独指定力。CyberGrasp系统允许手的全范围运动,不会妨碍佩戴者的运动。该装置可完全调节,设计适合各种手。
CyberGrasp系统最初是根据与美国海军签订的STTR合同开发的,用于远程机器人应用,它允许操作员控制远程定位的机器人“手”,并从字面上“感觉”被操纵的物体。CyberGrasp 力反馈数据手套
CyberGrasp设备是轻巧的,能反射力的外骨骼,可安装在CyberGlove数据手套(有线版本)上,并向每个手指添加阻力反馈。借助CyberGrasp力反馈系统,用户可以在模拟的虚拟世界中感受计算机生成的3D对象的大小和形状。
详细介绍
CyberGrasp 力反馈数据手套
CyberGrasp系统是针对您的手指和手的创新力反馈系统。它使您可以“进入计算机”并掌握计算机生成的或遥控操作的对象。
CyberGrasp设备是轻巧的,能反射力的外骨骼,可安装在CyberGlove数据手套(有线版本)上,并向每个手指添加阻力反馈。借助CyberGrasp力反馈系统,用户可以在模拟的虚拟世界中感受计算机生成的3D对象的大小和形状。
抓力是由通过外骨骼路由到指尖的肌腱网络产生的。共有五个执行器,每个手指一个,可以单独编程以防止用户的手指刺入或压碎虚拟实体。高带宽执行器位于一个小的执行器模块中,可以将其放置在桌面上。此外,由于CyberGrasp系统不提供接地力,因此执行器模块也可以戴在GraspPack背包中以进行便携式操作,从而大大增加了有效的工作空间。
该设备会在整个运动范围内施加大致垂直于指尖的抓握力,并且可以单独指定力。CyberGrasp系统可实现手的全方位运动,并且不会妨碍佩戴者的运动。该设备是完全可调的,适合各种手使用。
CyberGrasp系统最初是根据美国海军STTR合同开发的,用于遥控机器人应用,它使操作员可以控制远程机器人“手”并从字面上“感觉”被操纵的物体。
技术指标
力:每根手指12 N(最大,连续)
重量:16盎司(无CyberGlove系统的外骨骼)
工作空间:离执行器模块1米的球面半径
CyberGlove:CyberGrasp系统需要CyberGlove设备(建议使用22个传感器的CyberGlove设备)
仪表单元:包括力控制单元和执行器模块
接口:以太网
CyberGrasp系统建议使用CyberForce机械臂选项
|